বিষয়াবলী
সাধারণ ধারণা
- ভেক্টর রাশির নির্দেশনা (Representation of vectors) :

- $\overrightarrow{O P}=\vec{r}$ কোনো ভেক্টর হলে একে নির্দেশ করার জন্য $\vec{r}, \bar{r}, \underline{r}$ প্রভৃতি প্রতীক ব্যবহৃত হয় এবং এর মান
যথাক্রমে $|\vec{r}|,|\bar{r}|,|\underline{r}|$ ইত্যাদি দ্বারা নির্দেশিত হয় । অনেক সময় শুধু r দিয়ে ও r̅ ভেক্টরের মান প্রকাশ করাহয় ।
- একক ভেক্টর (Unit vector) : কোনো ভেক্টর রাশিকে তার মান (Magnitude) দ্বারা ভাগ করলে ঐ ভেক্টরের দিকে বা তার সমান্তরাল দিকে একক ভেক্টর পাওয়া যায় ।
- A̅ কোনো ভেক্টর ও তার দিকে বা সমান্তরালে একক ভেক্টর â হলে,
$\hat{a}=\frac{\vec{A}}{|\vec{A}|}$
- আয়ত একক ভেক্টর (Rectangular unit vectors) : ত্রিমাত্রিক স্থানাংক ব্যবস্থায় ধনাত্মক x, y এবং z অক্ষের দিকে যথাক্রমে ব্যবহৃত î , ĵ , k̂ একক ভেক্টরগুলোকে আয়ত একক ভেক্টর বলে ।
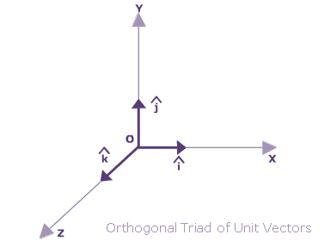
- অবস্থান ভেক্টর (Position vector) : প্রসঙ্গ কাঠামোর মূল বিন্দুর সাপেক্ষে কোনো বিন্দুর অবস্থান যে ভেক্টরের সাহায্যে নির্ণয় করা হয় তাকে অবস্থান ভেক্টর বলে ।
O বিন্দুর সাপেক্ষে P বিন্দুর অবস্থান নির্দেশ করেছে $\overrightarrow{O P}=\vec{r}$ অবস্থান ভেক্টর । লক্ষণীয়,
$\vec{r}=x \hat{\imath}+y \hat{\jmath}+z \hat{k}$
$|\vec{r}|=\sqrt{x^{2}+y^{2}+z^{2}}$
$\vec{r}=\frac{x \hat{\imath}+y \hat{\jmath}+z \hat{k}}{\sqrt{x^{2}+y^{2}+z^{2}}}$
- লব্ধি (Resultant) : দুই বা ততোধিক ভেক্টরের সমষ্টিকে একটি ভেক্টর রূপে প্রকাশ করা যায় যাকে ঐ ভেক্টরগুলোর লব্ধি বলে ।
A̅ = Axî+ Ayĵ + Azk̂; B̅ = Bxî + Byĵ + Bzk̂ ভেক্টরদ্বয়ের লব্ধি
A̅ + B̅ = (Ax+Bx) î+ (Ay+By) ĵ+ (Az+Bz) k̂
⇒ C̅ = Cx î+ Cyĵ+ Czk̂ [ C̅ = লব্ধি ভেক্টর]
$\therefore|\vec{C}|=\sqrt{C_{x}^{2}+C_{y}^{2}+C_{z}^{2}}$
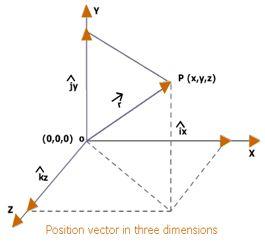
- লব্ধির সামান্তরিক সূত্র (Law of parallelogram) : কোনো নির্দিষ্ট বিন্দুর উপর পরস্পর θ কোণে ক্রিয়াশীল দুটি ভেক্টর P̅ ও Q̅ হলে, তাদের লব্ধি
$\vec{R}=\vec{P}+\vec{Q}$
$|\vec{R}|=\sqrt{P^{2}+Q^{2}+2 P Q \cos \theta}$
R̅,P̅ এর সাথে ϕ কোণ উৎপন্ন করলে,
$\boldsymbol{\phi}=\underline{\underline{\tan }^{-1}}\left(\frac{\mathrm{Q} \sin \theta}{\mathrm{P}+\mathrm{Q} \cos \theta}\right)$
- ভেক্টরের স্কেলার বা উট গুণন (Scalar or dot product) : A̅ও B̅ দুটি ভেক্টর ও তাদের মধ্যবর্তী কোণ Θ হলে, তাদের স্কেলার গুণন,
 . B̅ = ABcosθ [A̅. B̅ = B̅. A̅]
. B̅ = ABcosθ [A̅. B̅ = B̅. A̅]
আবার, A̅= Axî+ Ay ĵ+ Azk̂;
B̅ = Bxî + Byĵ + Bzk̂ হলে,
A̅. = AxBx + AyBy + AzBz
A̅ও B̅ পরস্পর লম্ব হলে θ = 90°
∴ A̅ . B̅ = AB cos 90° = 0 [cos90° = 0]
অর্থাৎ, দুটি ভেক্টর পরস্পর লম্ব হলে তাদের স্কেলার গুণফল শূন্য হবে ।
- ভেক্টর গুণন বা ক্রস গুণন (Vector or cross product) : A̅ ও B̅ দুটি ভেক্টর এবং তাদের মধ্যবর্তী কোণ θ হলে, ভেক্টর গুণন
C̅ = A̅×B̅ = η̂ABsinθ [A̅ × B̅ ≠ B̅ × A̅ ]
η̂ একটি একক ভেক্টর যা C̅ এর দিক নির্দেশ করে ।
আবার, A̅= Axî+ Ay ĵ+ Azk̂ ; B̅ = Bxî + Byĵ + Bzk̂ হলে,
$\vec{A} \times \vec{B}=\left|\begin{array}{lll}\hat{\imath} & \hat{\jmath} & \hat{k} \\ \mathrm{~A}_{\mathrm{x}} & \mathrm{A}_{\mathrm{y}} & \mathrm{A}_{z} \\ \mathrm{~B}_{\mathrm{x}} & \mathrm{B}_{\mathrm{y}} & \mathrm{B}_{z}\end{array}\right|$
A̅ও B̅ সমান্তরাল হলে, θ = 0°
∴ A̅ × B̅= AB sin0° = 0 [sin0° = 0]
অর্থাৎ, দুটি ভেক্টর সমান্তরাল হলে তাদের ভেক্টর গুণফল শূন্য হবে ।
- মধ্যবর্তী কোণ নির্ণয় : A̅ও B̅ দুটি ভেক্টর এবং তাদের মধ্যবর্তী কোণ θ হলে,
$\theta=\cos ^{-1} \frac{\vec{A} \cdot \vec{B}}{A B}=\sin ^{-1} \frac{\vec{A} \times \vec{B}}{A B}$
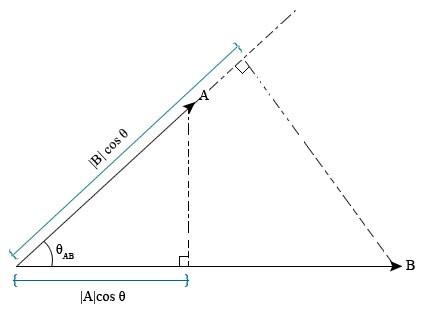
- ভেক্টরের লম্ব অভিক্ষেপ বা অভিক্ষেপ (Orthogonal projection) : $\overrightarrow{O P}=\vec{A}$ এবং $\overrightarrow{O Q}=\vec{B}$ পরস্পর θ কোণে ক্রিয়ারত দুটি ভেক্টর হলে,
⇒ A̅ এর উপর B̅ এর অভিক্ষেপ = $\mathrm{B} \cos \theta=\frac{\vec{A} \cdot \vec{B}}{A}$
⇒ B̅ এর উপর A̅ এর অভিক্ষেপ = $\mathrm{A} \cos \theta=\frac{\vec{A} \cdot \vec{B}}{B}$
গাণিতিক সমস্যা ও সমাধান
1. 5î+4ĵ-2k̂ ভেক্টরের দৈর্ঘ্য নির্ণয় কর ।
সমাধানঃ
∴ নির্ণেয় দৈর্ঘ্য = $\sqrt{5^{2}+4^{2}+(-2)^{2}}$ [ r̂ = x î+yĵ+zk̂ হলে, $|\vec{r}|=\sqrt{x^{2}+y^{2}+z^{2}}$ ]
= √45
= 3√5
2. A̅ = î-2ĵ-2k̂ এবং B̅ = 6î+3ĵ+2k̂ ভেক্টর দুটির অন্তর্ভুক্ত কোণের মান নির্ণয় কর ।
সমাধানঃ
ভেক্টরদ্বয়ের অন্তর্ভুক্ত কোণ θ হলে,
$\cos \theta=\frac{\vec{A} \cdot \vec{B}}{A B}$ [ A̅.B̅ = AB cosθ ; স্কেলার গুণন]
এখন, │A̅│ = √(12+22+22) = √9 = 3 = A
| B̅̅̅̅ | = √(62+32+22) = √48 = 7 = B
A̅.B̅ = (1)(6) + (-2)(3) + (-2)(2) [A̅.B̅ = AxBx + AyBy + AzBz]
= -4
$\cos \theta=\frac{\vec{A} \cdot \vec{B}}{A B}=-4 / 21$
∴ θ = cos-1(-4/21)
3. a̅ = î+ĵ+k̂ , b̅ = √3 î+3ĵ-2k̂ , b̅ এর উপর a̅ এর অভিক্ষেপ বের কর ।
সমাধানঃ
$\mathrm{a} \cos \theta=\frac{\vec{a} \cdot \vec{b}}{b}$
এখন, a̅.b̅ = (1)(√3) + (1)(3) + (1)(-2) = √3+1 [ A̅.B̅ = AxBx + AyBy + AzBz]
b = │b̅│ = $\sqrt{(\sqrt{3})^{2}+3^{2}+(-2)^{2}}$ = 4 [│r̅│ = r = $\left.\sqrt{x^{2}+y^{2}+z^{2}}\right]$ ]
$\therefore \mathrm{a} \cos \theta=\frac{\vec{a} \cdot \vec{b}}{b}=1 / 4(\sqrt{3}+1)$
4. A̅ = î+3ĵ-2k̂ ও B̅ = 4î-2ĵ+3k̂ হলে 3A̅ + 2B̅ এবং | 3 A̅ +2B̅ | নির্ণয় কর ।
সমাধানঃ
3A̅ + 2B̅ = 3(î+3ĵ-2k̂) + 2(4î-2ĵ+4k̂)
= 3î+9ĵ-6k̂+8 î-4ĵ+6k̂ [m(Axî+Ay ĵ+Az k̂) = mAxî + mAy ĵ + mAz k̂]
= 11î + 5ĵ + 2k̂
$\therefore|3 \vec{A}+2 \vec{B}|=\sqrt{11^{2}+5^{2}+2^{2}}=\sqrt{150}=5 \sqrt{6}$
5. a এর মান কত হলে a î-2ĵ+k̂ এবং 2aî-aĵ-4k̂ পরস্পর লম্ব হবে?
সমাধানঃ
দুটি ভেক্টর পরস্পর লম্ব হলে তাদের স্কেলার গুণফল শূন্য হবে ।
∴ (a)(2a) + (-2)(-a) + (1)(-4) = 0 [ .
. = AxBx + AyBy + AzBz]
= AxBx + AyBy + AzBz]
⇒ 2a2+2a-4 = 0
⇒ a2+a-2 = 0
⇒ a2+2a-a-2 = 0
⇒ a(a+2)-1(a+2)
⇒ (a+2)(a-1)
∴ a = -2,1